dynamicrc.com
Albatros 제작과정
스팬 : 416mm
목표중량(배터리 제외) : 50g
모터 : GWS LPS-B2C-C 감량
프로펠러 : EP7060 또는 EP6050
배터리 : 리튬폴리머 145mAh 2셀 또는 250mAh 2셀
수신기 : GWS R-4P PICO 감량
마그네틱 액츄에이터 : BSD Standard 마그네틱 액츄에이터 x 2(러더, 엘리베이터)
마그네틱 액츄에이터 드라이버 : BSD DDPC
이번 프로젝트의 목표는 수직상승이었으나 기자재의 무게(배터리 포함)를 측정해본 결과 40g을
훌쩍 넘어버렸습니다. 기체를 15g 으로 마무리하고 EP7060 프로펠러를 사용할 경우 추력대 중량
비가 1:1 이 됩니다만 아무래도 무리인 것 같습니다. 결국 다이브없이 루프하는 것을 목표로
작업을 진행합니다.

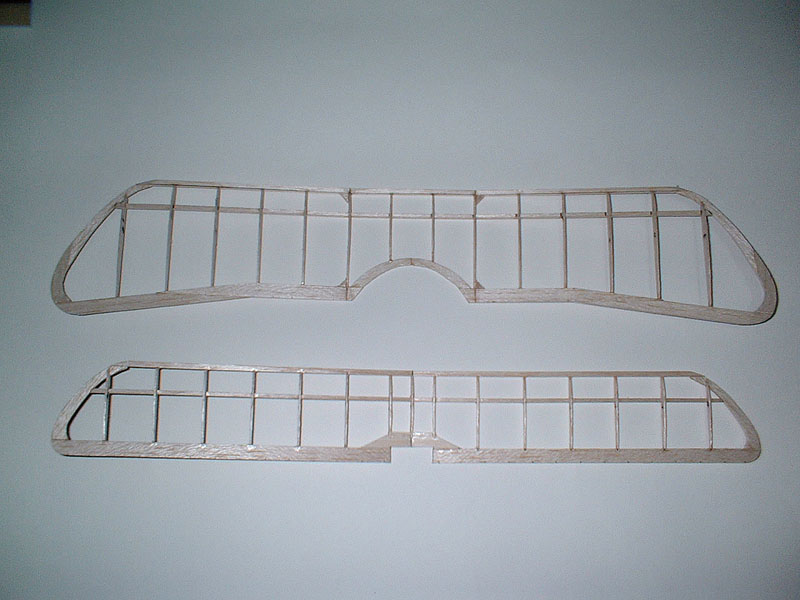
앞전은 3mm, 뒷전과 스파는 2mm, 리브는 1mm 발사로 구성된 주날개 입니다.
주날개의 곡선이 아름답습니다.
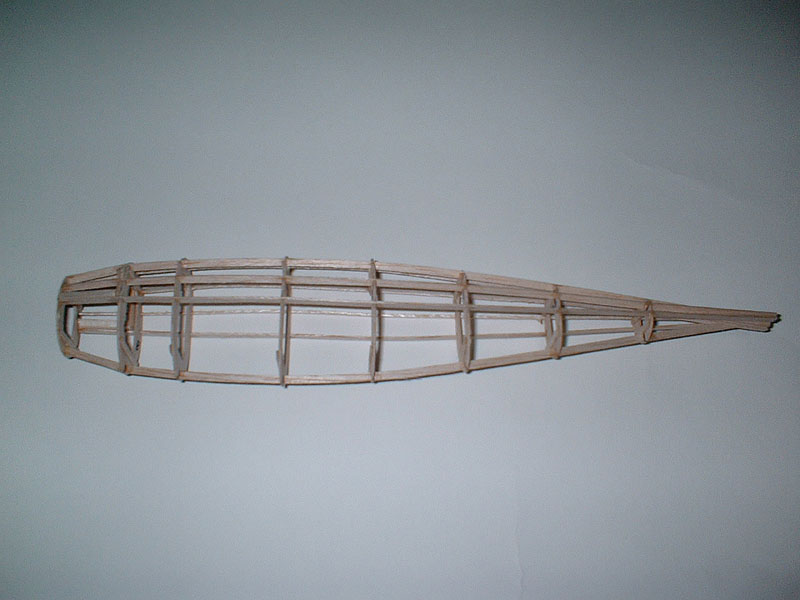
1mm 발사로 구성된 동체뼈대입니다. 날렵한 유선형의 동체입니다.
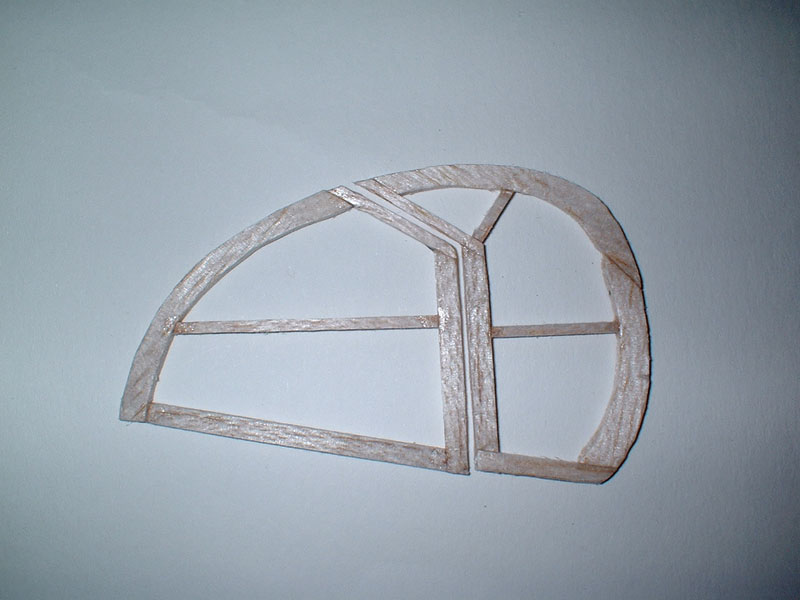
2mm 발사로 만든 수직꼬리날개입니다. 샌딩 전입니다.
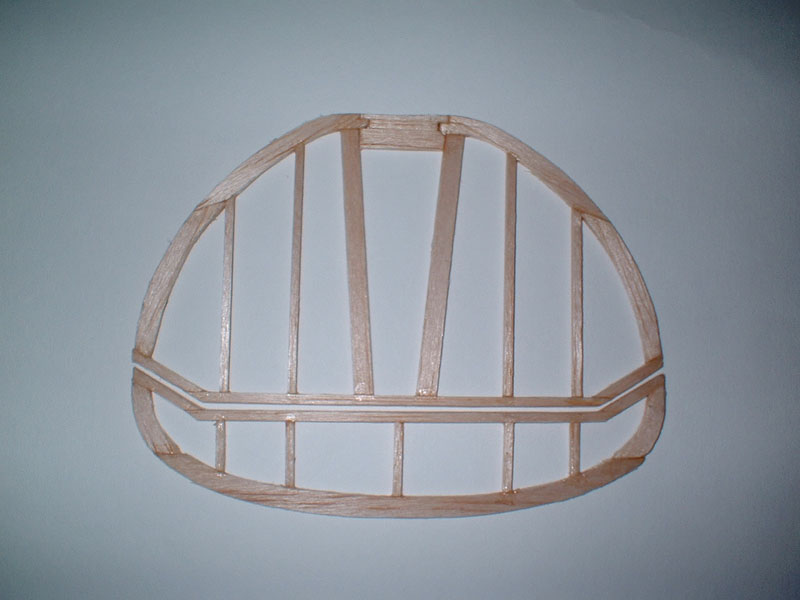
2mm 발사로 만든 수평꼬리날개입니다. 샌딩 전입니다.
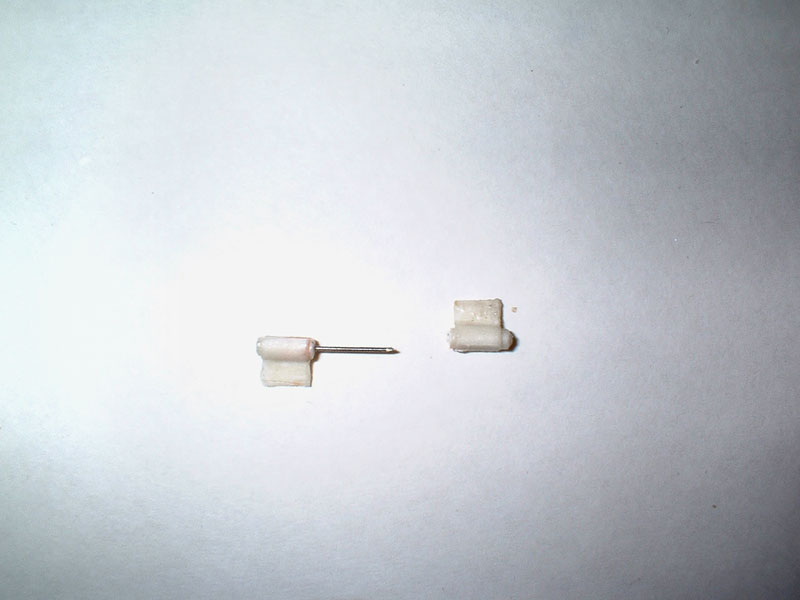
종이를 말아만든 힌지입니다. 마그네틱 액츄에이터의 토크가 약하므로 힌지는 아주 부드럽게 움직여야 합니다.

수직꼬리날개에 힌지를 설치한 모습입니다.

주날개 지지대입니다. 1mm 발사에 0.5mm 카본로드를 대어 보강합니다.
그간 다른 작업과 게으름으로 인해 알바트로스 프로젝트가 많이 늦어졌습니다. 오래 기다리신 분들께 죄송합니다.
알바트로스가 완성될 때까지 절대 한 눈 팔지 않겠습니다. 그럼 다시 시작합니다.
(알바트로스 프로젝트를 시작할 때는 BSD 액츄에이터를 사용해 리모트 방식으로 러더, 엘리베이터를 컨트롤하려 했으나 제작중
링키지 문제 등 난관에 부딪혀 타면과 직접 연결 방식으로 바꾸었습니다.)
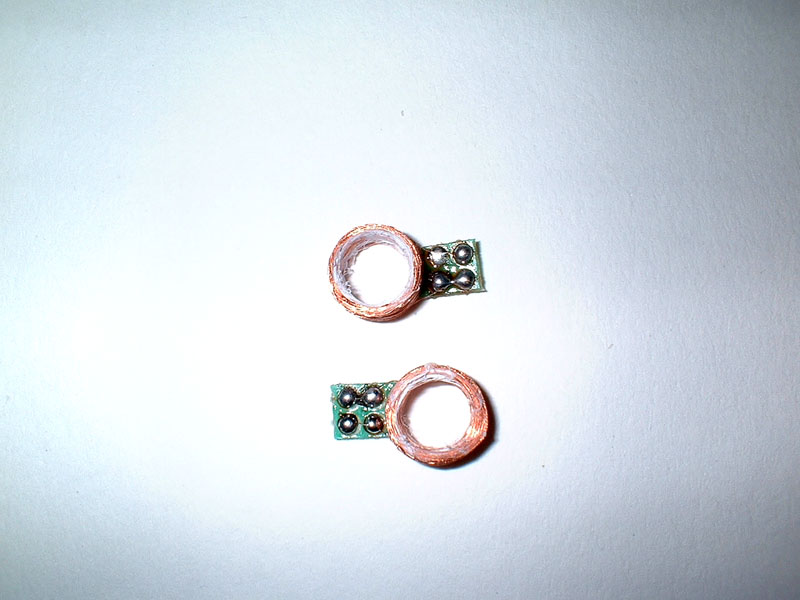
직접 감아본 액츄에이터 코일입니다. 내경 7mm 폭 4mm 로 460번 감으니 50오옴이 나옵니다.
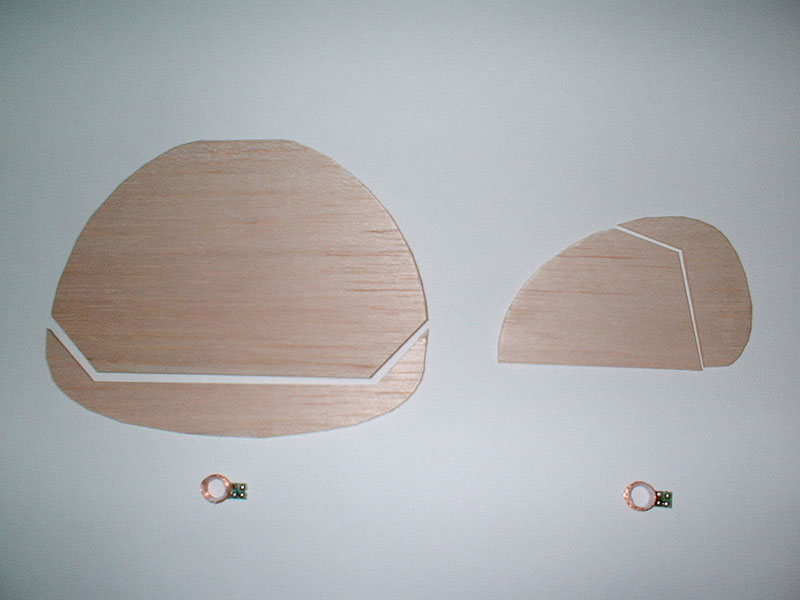
2mm 발사판으로 새로 만든 꼬리날개입니다. 전체적으로 샌딩을 해서 무게를 줄여야 할 것 같습니다. 따로 커버링을 하지
않고 채색으로 마무리할 예정입니다. 아래로 액츄에이터 코일이 보입니다. 저 작은 액츄에이터로 과연 충분한 토크와
양호한 조종성이 나와줄지는 의문입니다.
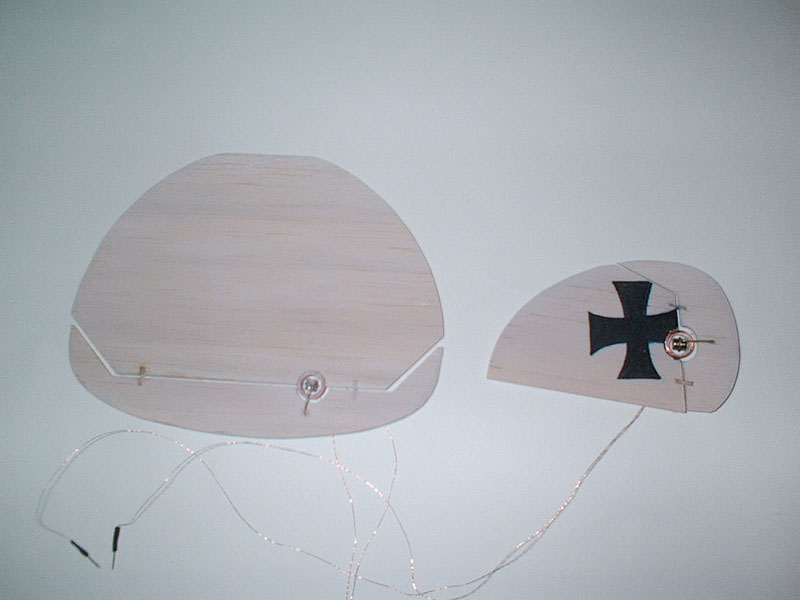
러더와 엘리베이터에 액츄에이터를 설치했습니다. 과연 풍압에 견뎌줄 지 테스트를 위해 6050 프로펠러로 풀스로틀로 돌려
보았습니다. 충분한 토크로 엘리베이터와 러더가 풍압을 이겨내고 프로포셔널하게 움직였습니다. 약간의 밀림은 있지만 우
려할만한 것은 아니었습니다. 과연 비행시에는 어떨까요? 아니 비행은 가능할까요?

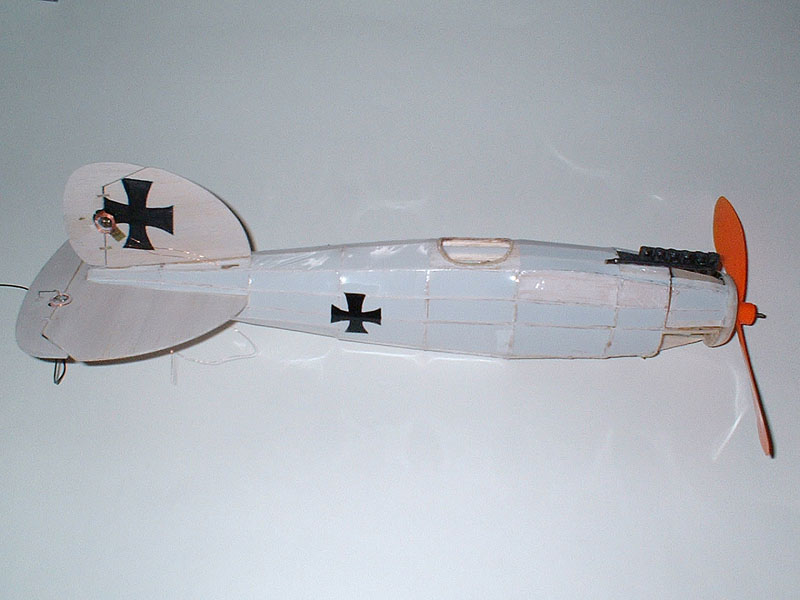
microlite로 커버링 후 프라모델용 에나멜로 독일군 마크를 그려넣었습니다.
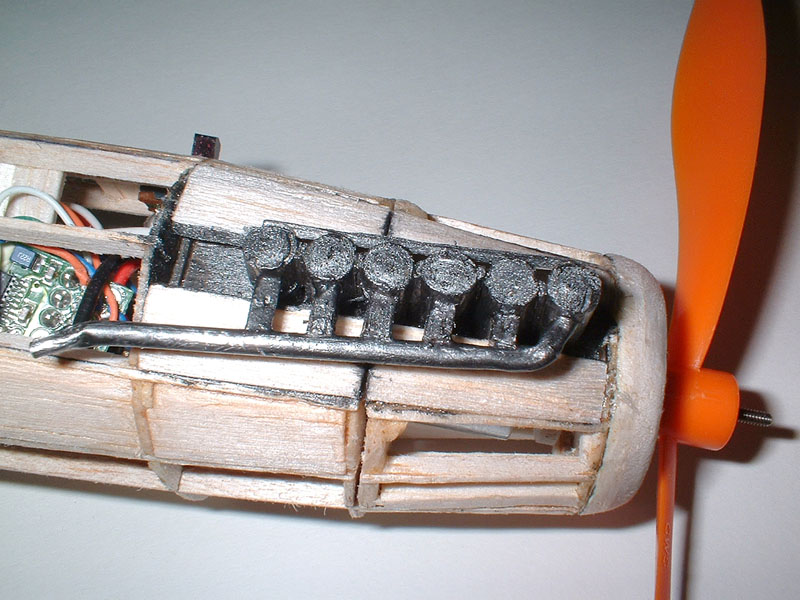
더미엔진을 만들어 보았습니다. 발사와 알루미늄관에 건메탈로 채색. 그나마 분위기가 납니다.
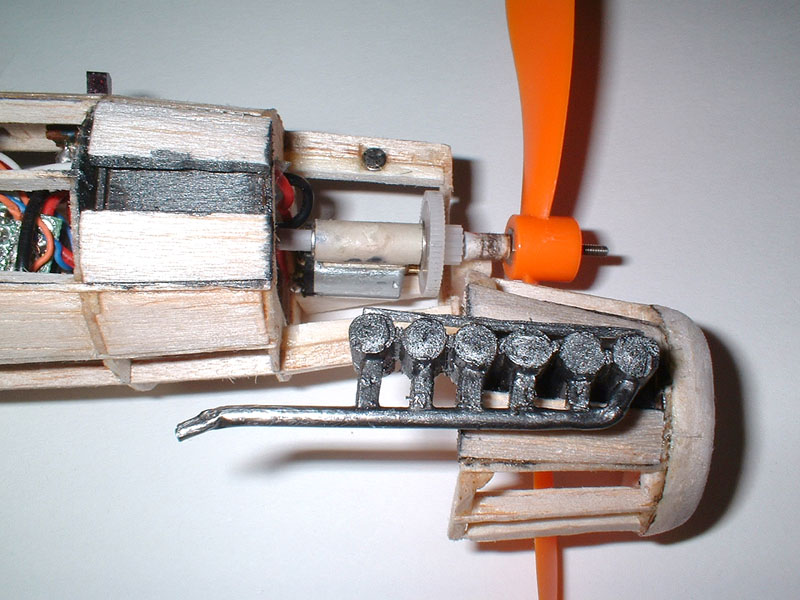
기수부분은 탈부착이 가능합니다. 모터의 수리, 교체 등에 유용합니다.
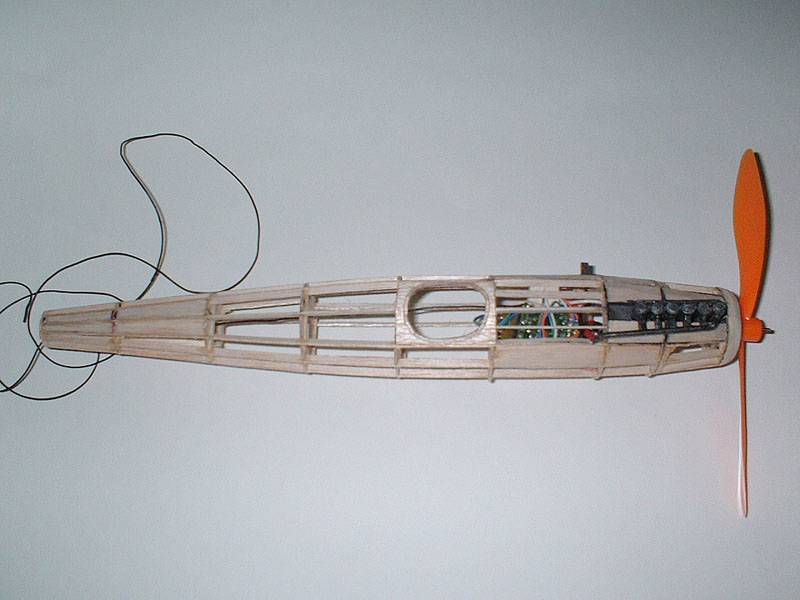
커버링 전 동체의 모습입니다.
동체커버링과 꼬리날개를 부착한 모습입니다. 동체는 빨간색 스프레이로 부분 채색할 예정입니다.

드디어 완성입니다. 145mAh 리튬폴리머 2셀 포함 58g 으로 마무리했습니다. 기체만의 무게는 50g 정도 됩니다.

목표중량에는 들어왔는데 비행은 어떨지 알 수 없습니다.

측면에서 한 컷.
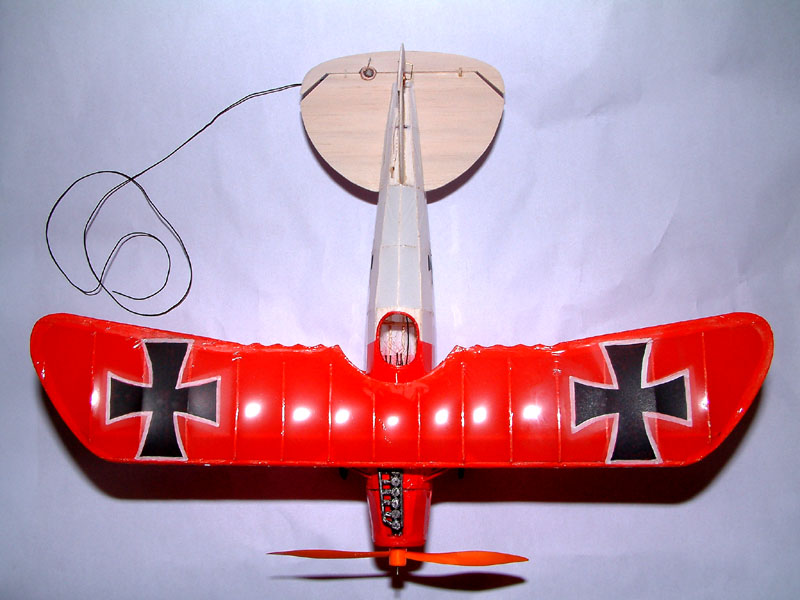
위쪽에서 한 컷. 기수부분은 사이드 트러스트와 다운 트러스트 수정이 가능하도록 아래부분을 비워두었습니다.