PIPER CUB 제작 과정
스팬 : 400mm
중량(배터리 제외) : 20g
모터 : KP-00 2.75:1 개조
프로펠러 : U-80
배터리 : 리튬폴리머 145mAh 1셀 또는 210mAh 1셀
수신기(ESC, 마그네틱 액츄에이터 드라이버 내장) : RFFS-100 초기제품
마그네틱 액츄에이터 - 러더, 엘리베이터
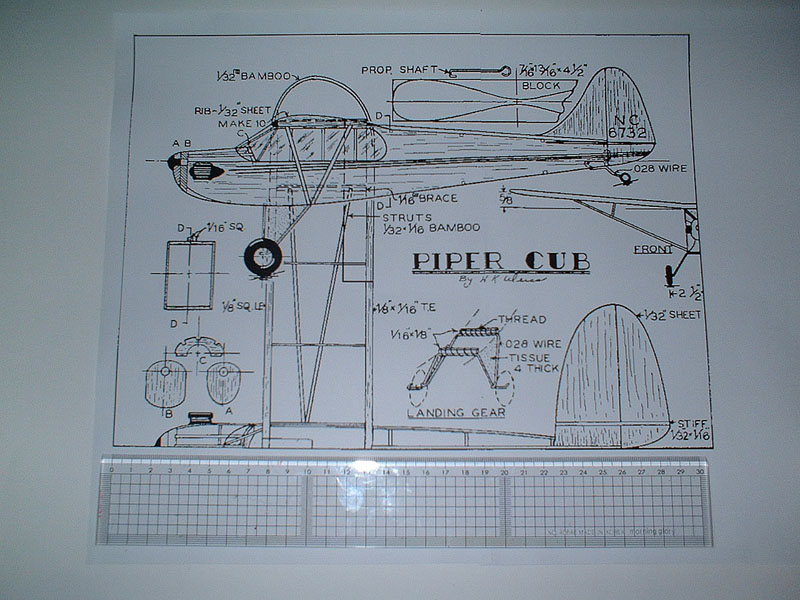
인터넷에서 구한 도면을 원본의 40% 로 축소해서 출력했습니다(A4용지 두장).
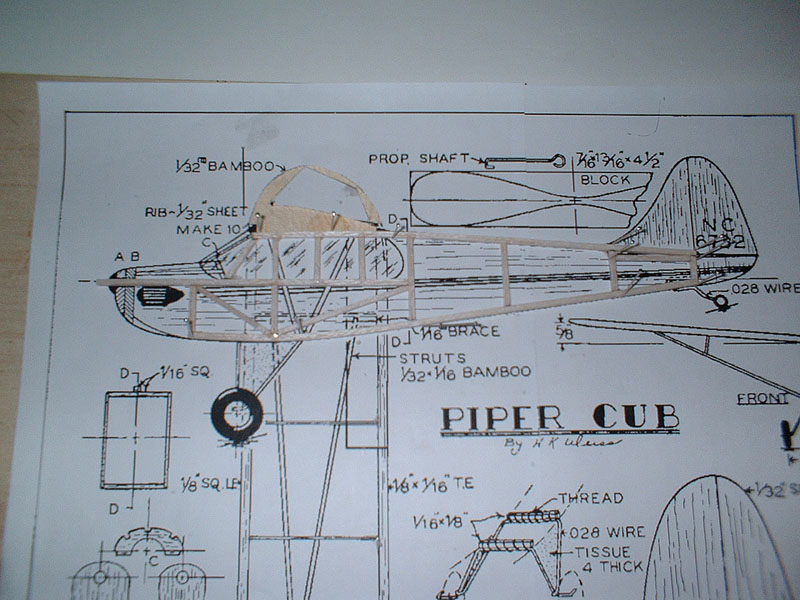
도면을 깔고 2mm 발사를 이용해 동체뼈대를 만듭니다.

핀을 이용해 뼈대가 움직이지 않도록 고정하고 작업하면 정확한 모양을 만들수 있습니다.
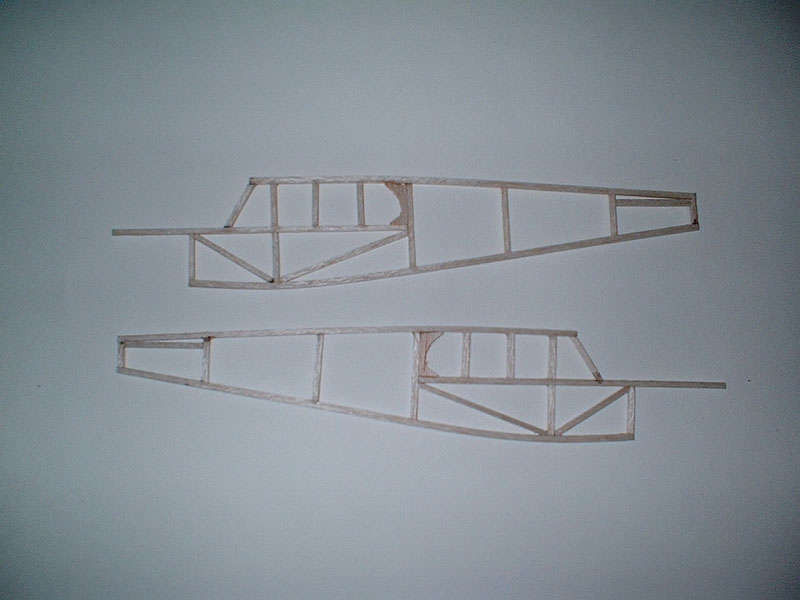
한쌍의 동체 측면이 만들어졌습니다.
주날개입니다. 앞전은 5mm 발사, 뒤전은 2mm, 리브는 1mm 발사입니다.

주날개와 동체의 부착을 쉽게 하기위해 작은 네오디뮴 자석을 이용했습니다.
기체가 워낙 가볍다보니 이정도로 충분히 지탱해 줍니다.
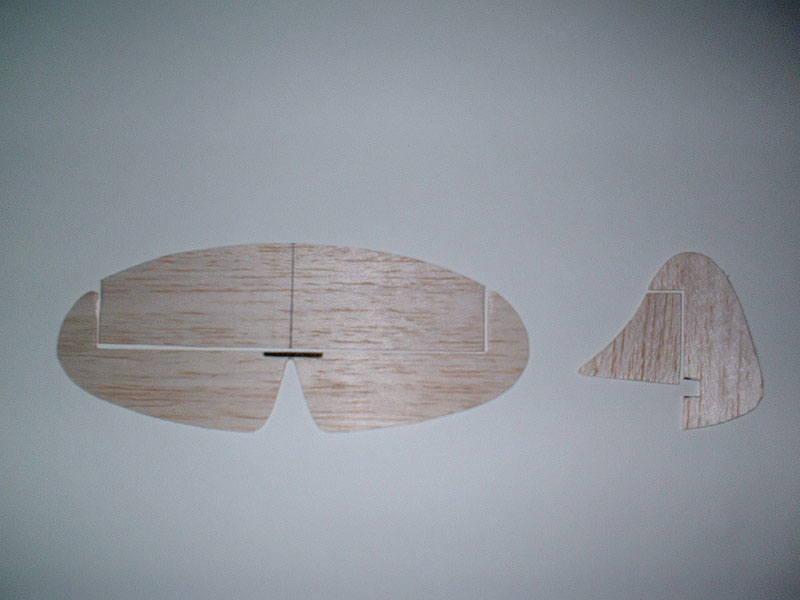
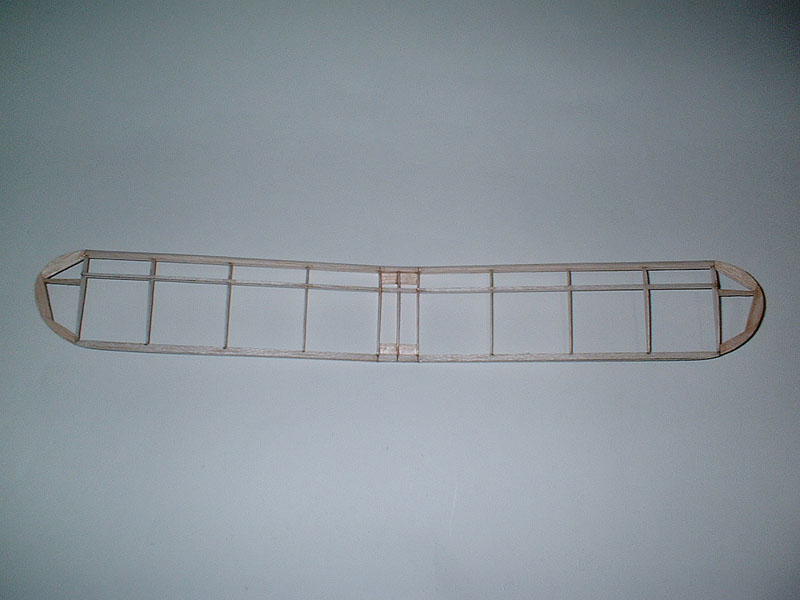
1mm 발사로 만든 꼬리날개입니다.
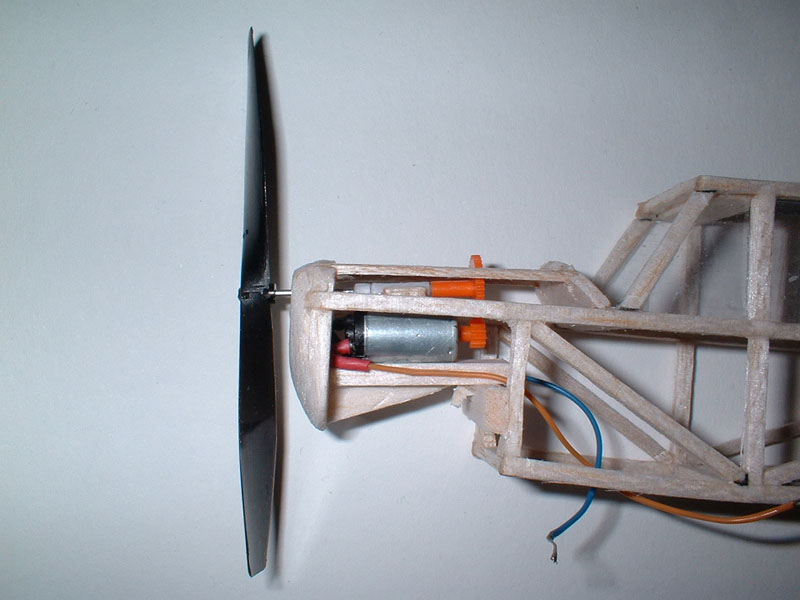
모터를 설치했습니다. 다운 트러스트와 사이드트러스트를 충분히 주었습니다.

동체 뼈대를 거의 완성한 모습입니다.
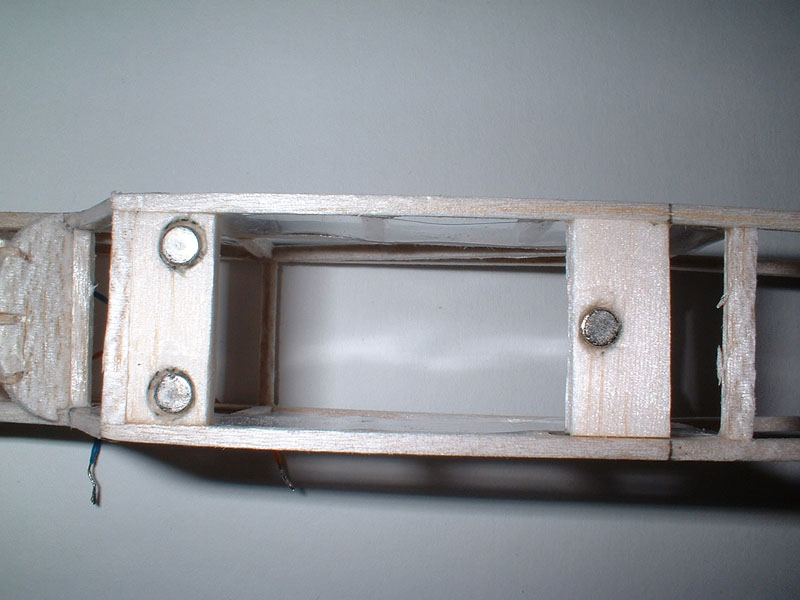
주날개가 부착될 동체의 자석 배치입니다.
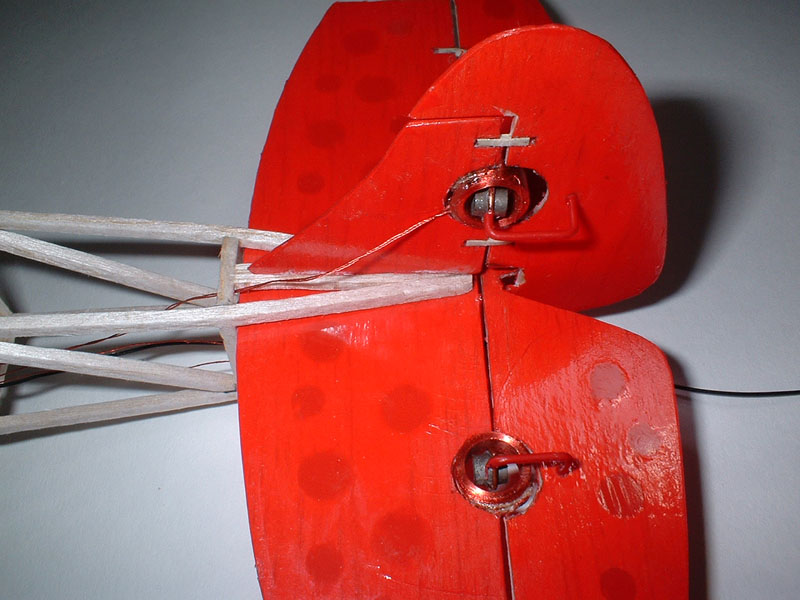
러더와 엘리베이터에 마그네틱 액츄에이터를 장치한 모습입니다.

엘리베이터의 중립을 위해 액츄에이터 자석 앞쪽에 네오디뮴 자석을 부착했습니다.
엘리베이터의 하중때문에 중립이 잘 나오지 않기 때문입니다. 보통 균형을 위해 작은 추를
달지만 이 방법이 훨씬 효율적입니다. 자석의 위치를 옮겨가며 중립위치를 찾으면 됩니다.
러더는 고무줄 힌지의 장력만으로도 충분합니다.
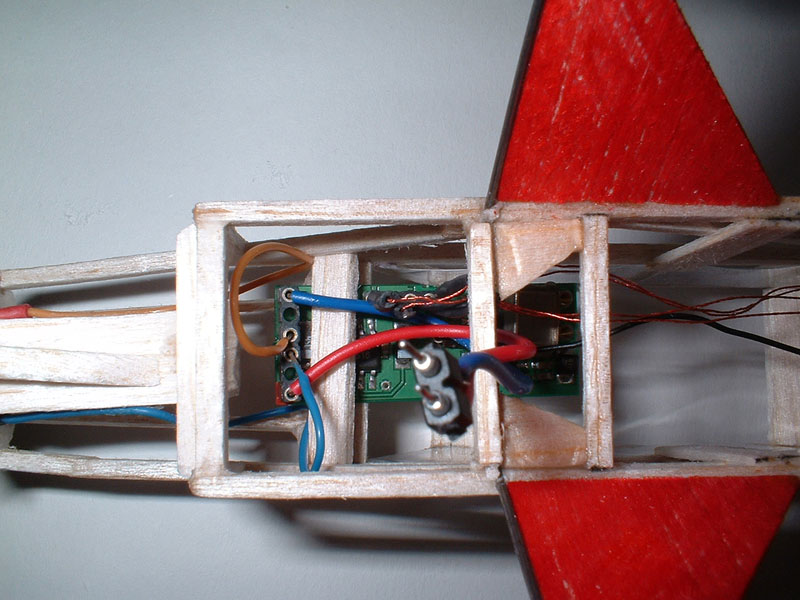
RFFS-100 수신기를 적절한 위치에 배치합니다.
동체 내부 공간이 좁아 배터리는 밖으로 빼내었습니다.

보조바퀴를 만들어보았습니다. 구르지는 않습니다.
동체를 커버링하기 전 주날개를 부착한 모습입니다.

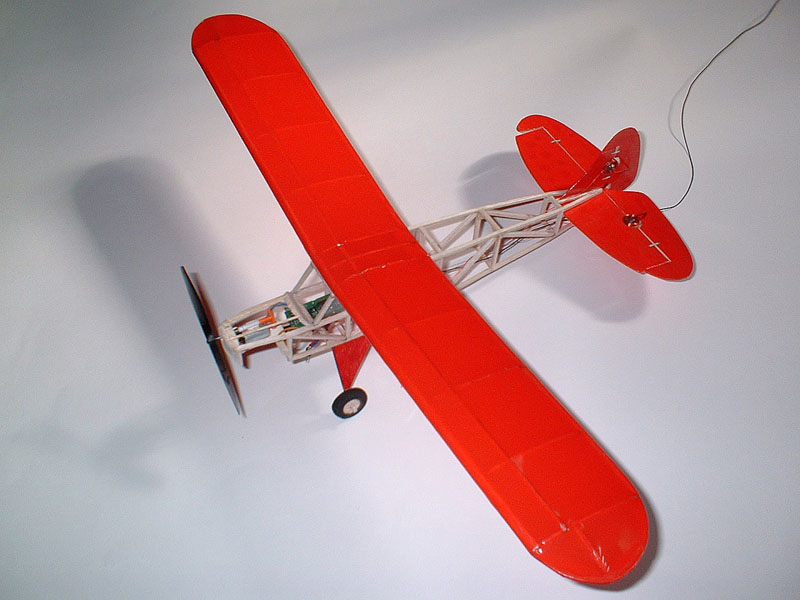
PIPER CUB 완성모습입니다. 커버링은 빨간색 MicroLite 를 사용했습니다.

배터리 제외 중량이 20g 입니다.
바람이 꽤나 부는 가운데 시험비행을 실시했습니다. 145mAh 리튬폴리머 전지를 장착하고
택싱, 몇 미터 활주하다 이륙했습니다. 바람이 강해 거의 호버링을 하고 있었습니다.
사이드트러스트의 부족으로 우타가 잘 먹지 않았습니다. 일단 착륙시키고 작업실로 돌아가
바람이 잘 때까지 기다리면서 사이드트러스트를 수정했습니다. 오후 5시쯤 되니 바람이 거의
불지 않았습니다. 역시 리튬폴리머 145mAh 를 장착하고 활주(활주시 기체가 왼편으로 많이 치우
쳤습니다. 조금 더 손을 봐야 할 듯 싶었습니다.) 이륙했습니다. 전번보다 우타가 확실히 잘
먹었습니다. 아주 안정적인 비행이었습니다. 추력이 넘쳐나는 기색은 없었으나 비행하기에는
전혀 무리가 없었습니다. 일단은 특성을 파악하고 버릇을 찾아 고칠 생각으로 선회비행만 쭈욱
했습니다. 좌선회는 아주 민감한 반응을 보인반면 우선회는 아주 느긋한 반응을 보였습니다.
사이드트러스트를 조금 더 증가시켜야 할 것 같습니다. 거의 풀스로틀로 5분 정도 날리자 추력의
저하가 눈에 띄었으므로 착륙시켜 회수했습니다.
초소형기 답지 않게 꽤나 실기감이 느껴지는 기체였습니다. 아이들이나 어른 모두 비행모습을
보고 즐거워했습니다. 심지어 산책나온 개도 PIPER CUB 을 따라 신나서 달려가더군요.^^