Pitts 제작 과정
스팬 : 400mm
목표중량(배터리 제외) : 65g
모터 : GWS LPS-B2C-C 6.2:1(감량)
프로펠러 : GWS EP6050 또는 EP7060
수신기 : GWS R4P
ESC : GWS ICS-100
서보 : Hitec HS-50 (또는 GWS PICO BB)
배터리 : 리튬폴리머 145mAh 2셀 또는 250mAh 2셀(예정)
3채널 에일러론, 엘리베이터 사양
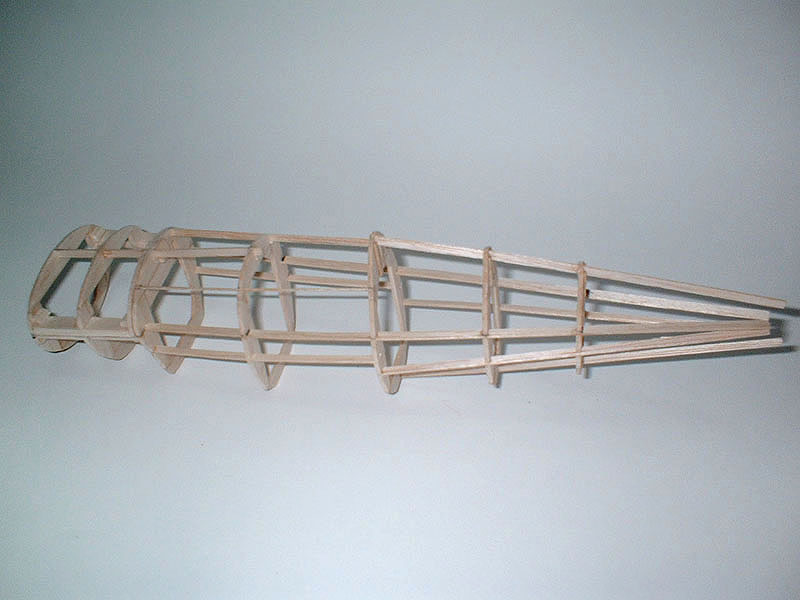
동체는 2mm 발사와 1mm 발사로 이루어집니다.

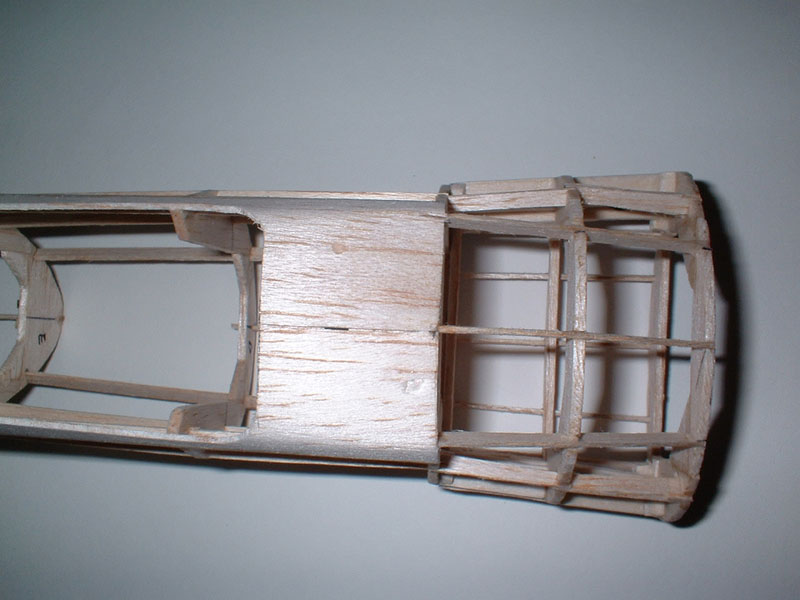
기수부분은 네오디뮴 자석을 이용해 개폐가 가능하도록 만듭니다.
모터부 수리, 교체시 유용합니다.
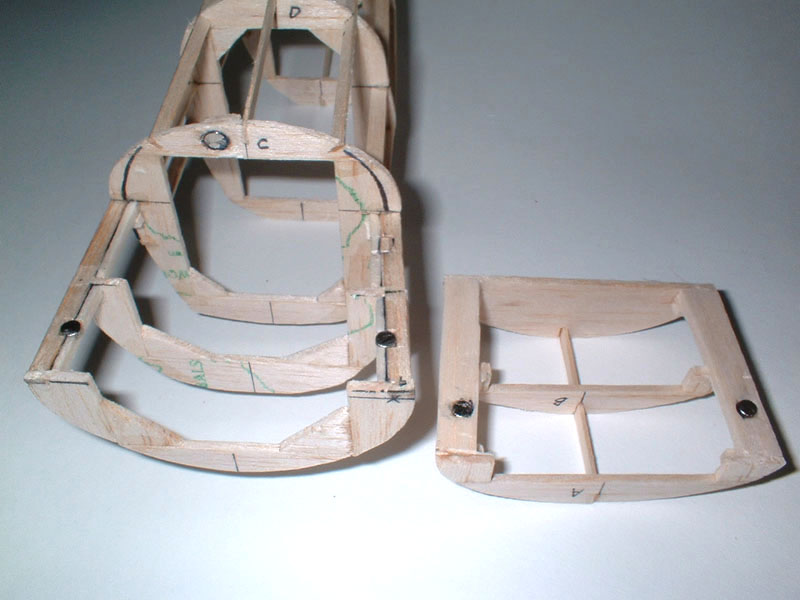
직경 3mm 네오디뮴 자석과 5mm 네오디뮴 자석을 사용합니다.
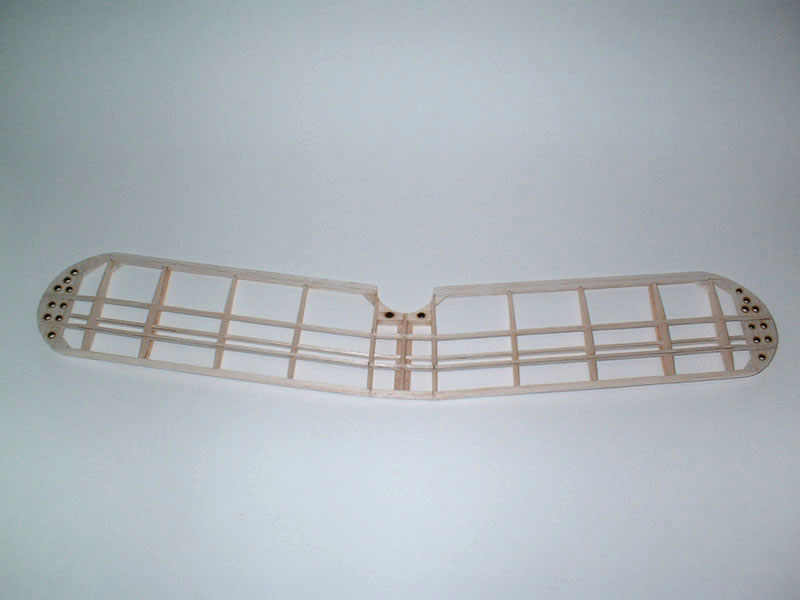
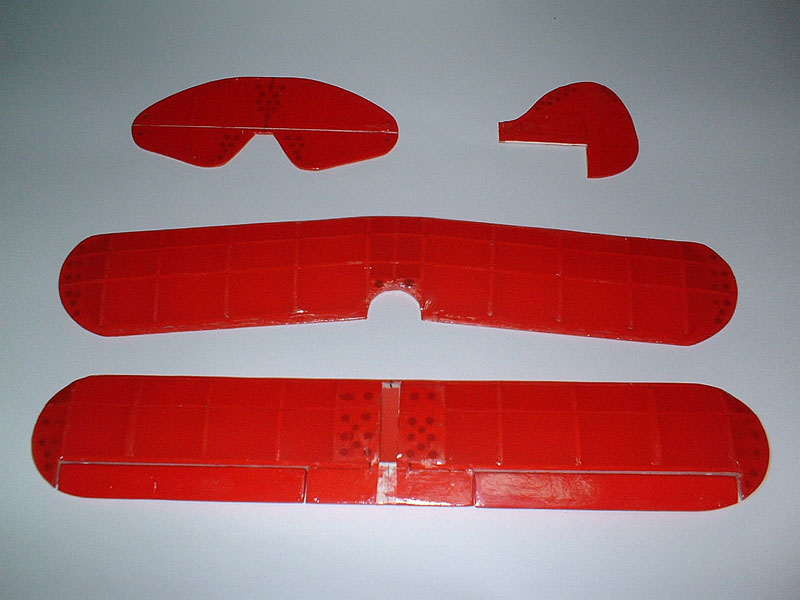
리브와 뒷전은 2mm 발사 앞전은 5mm 발사로 만듭니다.
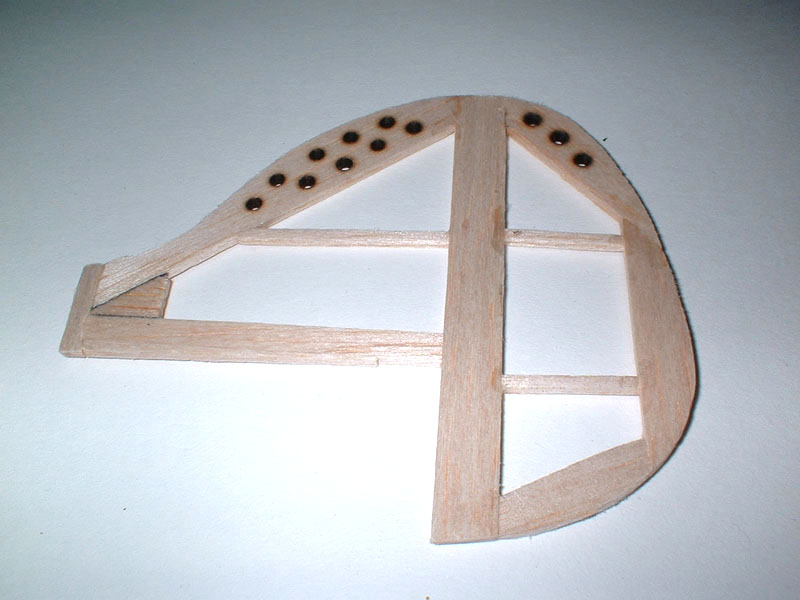
윗날개의 중심부 아래쪽 면입니다.
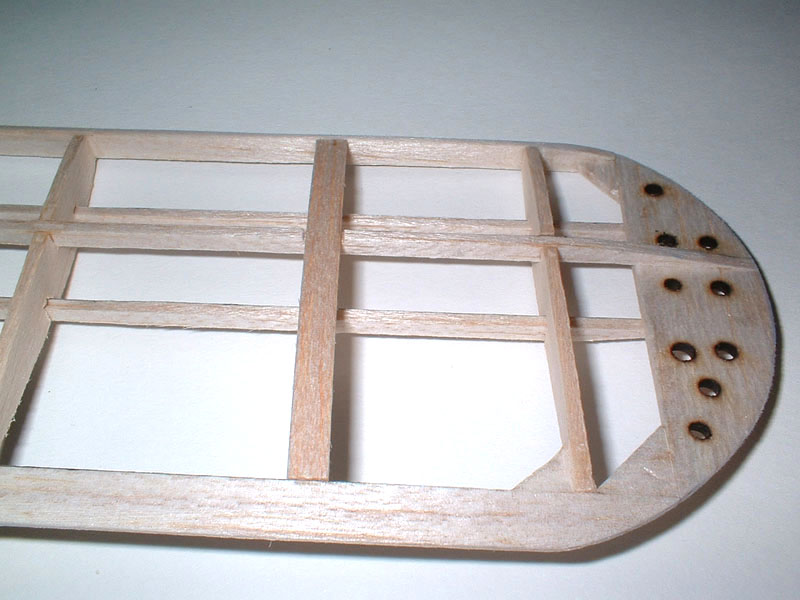
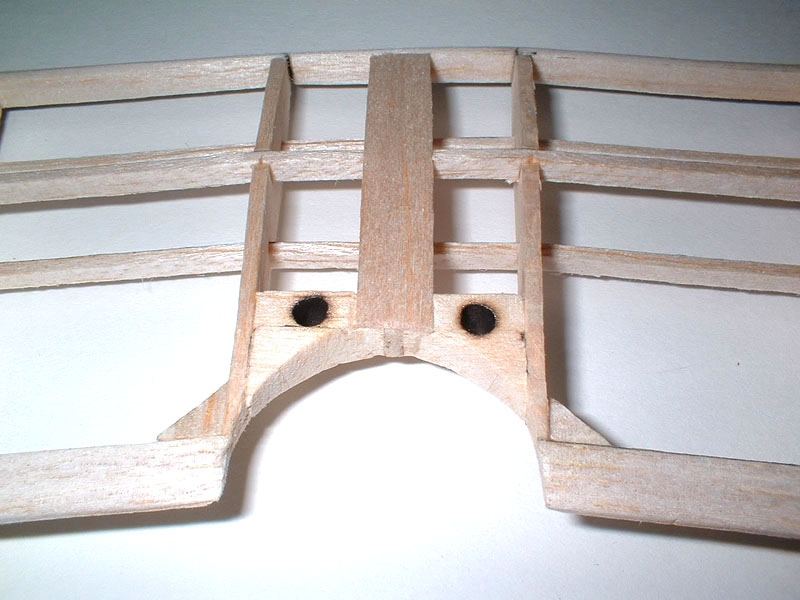
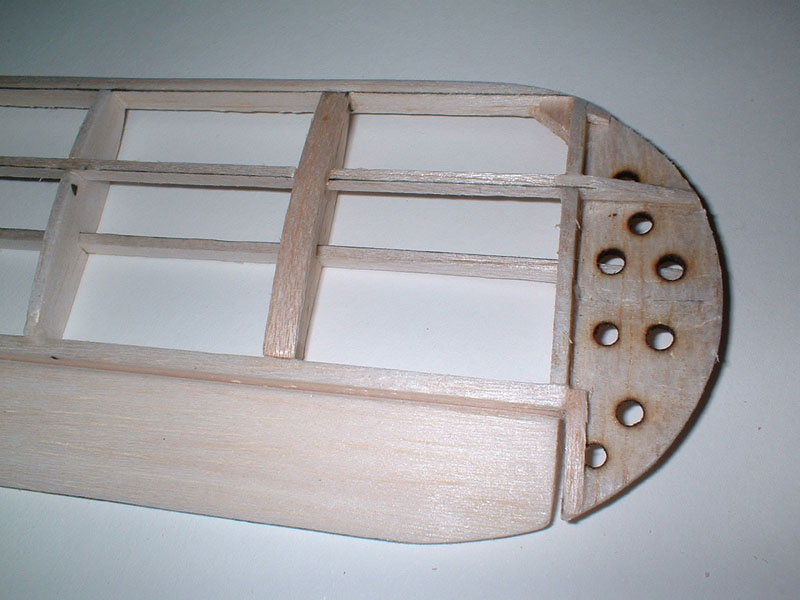
윗날개 아래면으로 날개지지대(strut)가 설치되는 곳은 1mm 발사를 덧대어 넓게 만듭니다.
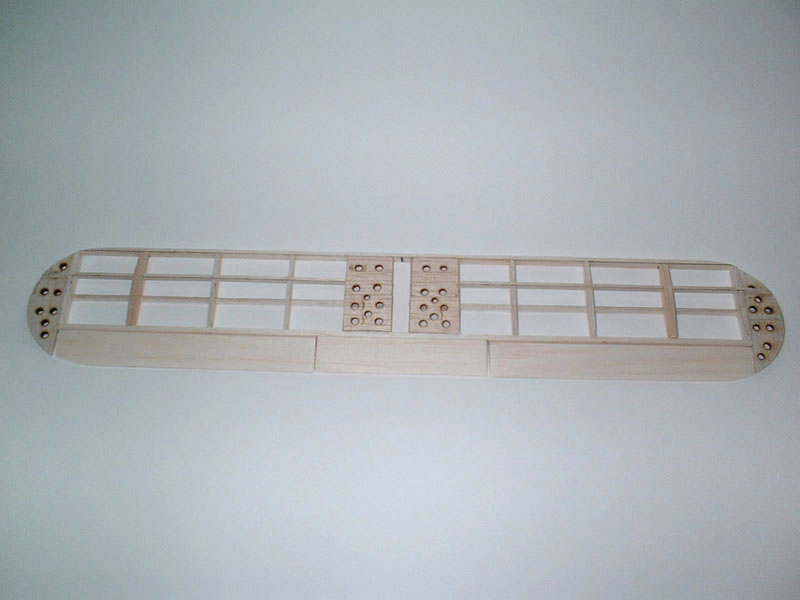
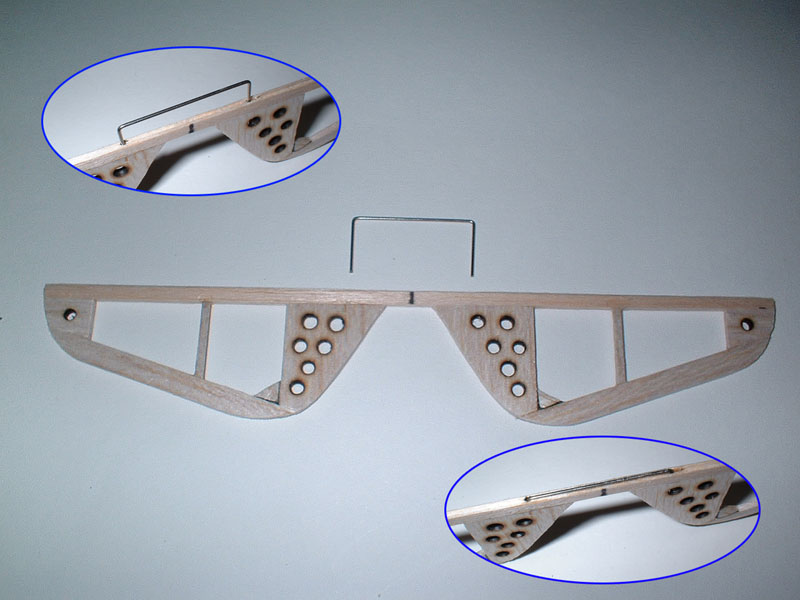
아래날개입니다. 에일러론 사양이므로 3mm 발사 두장을 겹쳐 에일러론을 만듭니다.
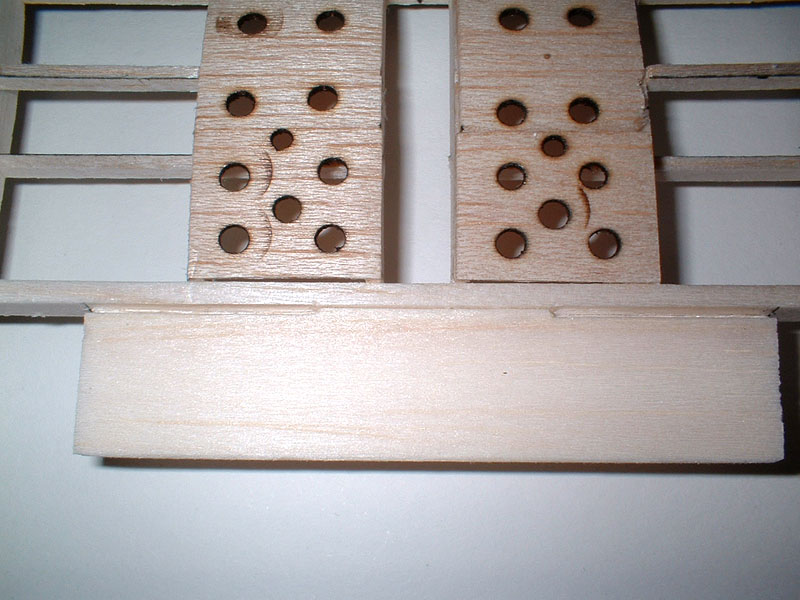
아래날개 윗면으로 날개지지대(strut)가 설치되는 곳은 1mm 발사를 덧대어 넓게 만듭니다.
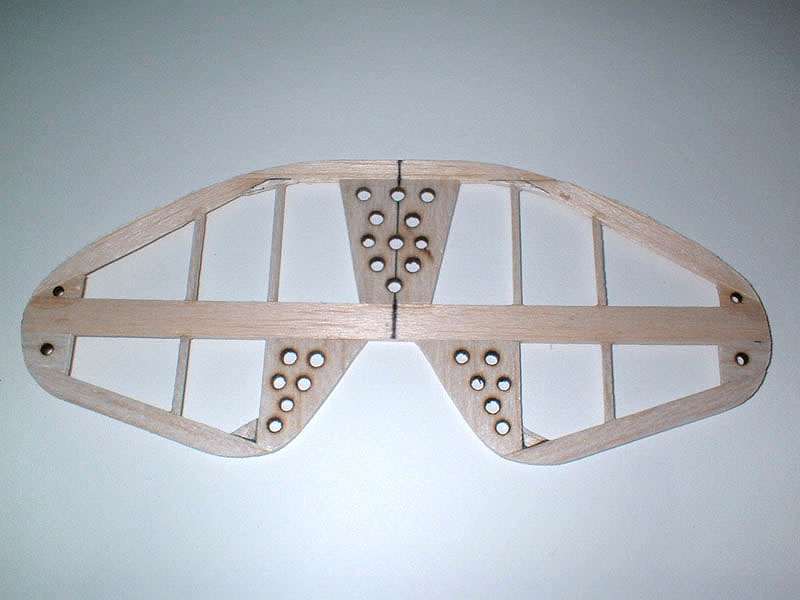
수평꼬리날개는 2mm 발사로 만듭니다.
2mm 발사판으로 만든 수직꼬리날개입니다.
엘리베이터를 만듭니다. 미리 만들어놓은 수평꼬리날개에서 엘리베이터 부분만 잘라냅니다.
그리고 강도유지를 위해 피아노선(0.7mm)을 심습니다.
에일러론 링키지가 들어갈 아래날개 부분입니다.
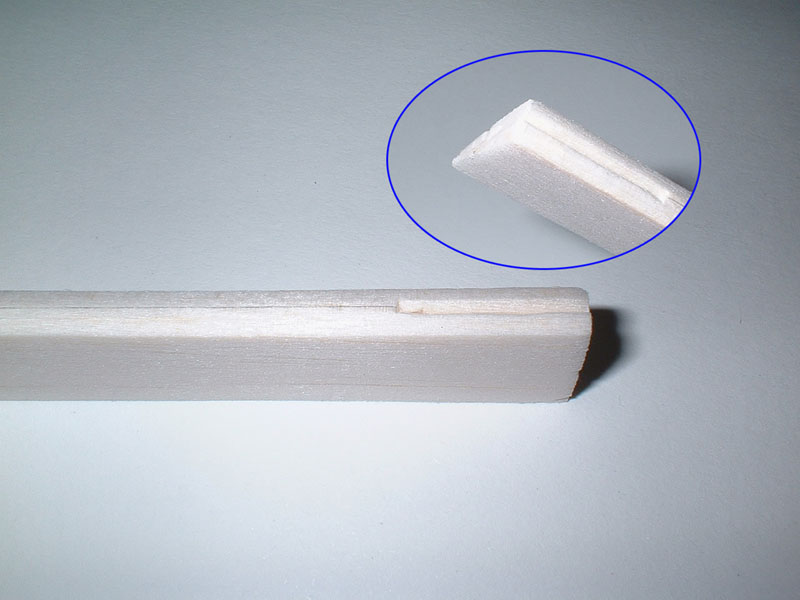
3mm 발사 두장을 겹쳐 만든 에일러론입니다. 샌딩후 에일러론 링키지 연결 부위를 다듬어 놓습니다.
피아노선을 이용해 에일러론 링키지를 만듭니다. 저점도 순간 접착제를 이용해 확실하게 고정합니다.
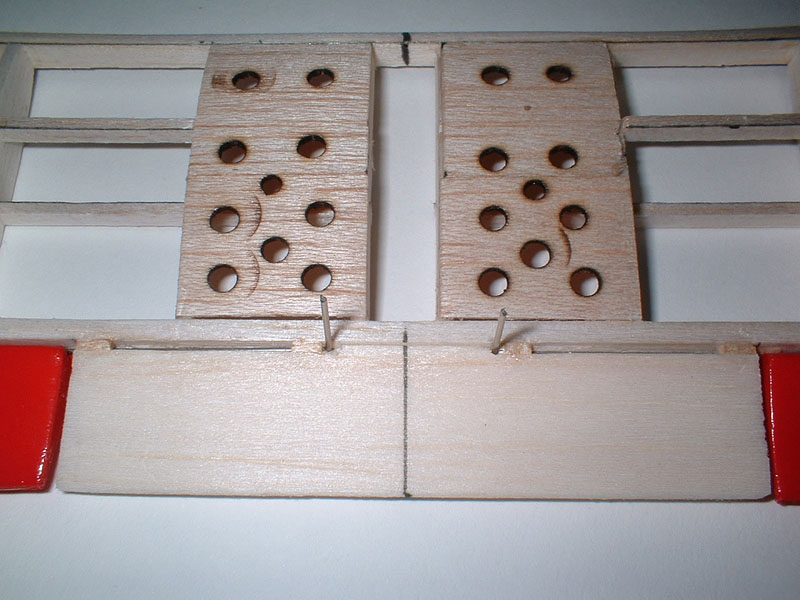
에일러론과 아랫날개를 연결한 모습입니다.
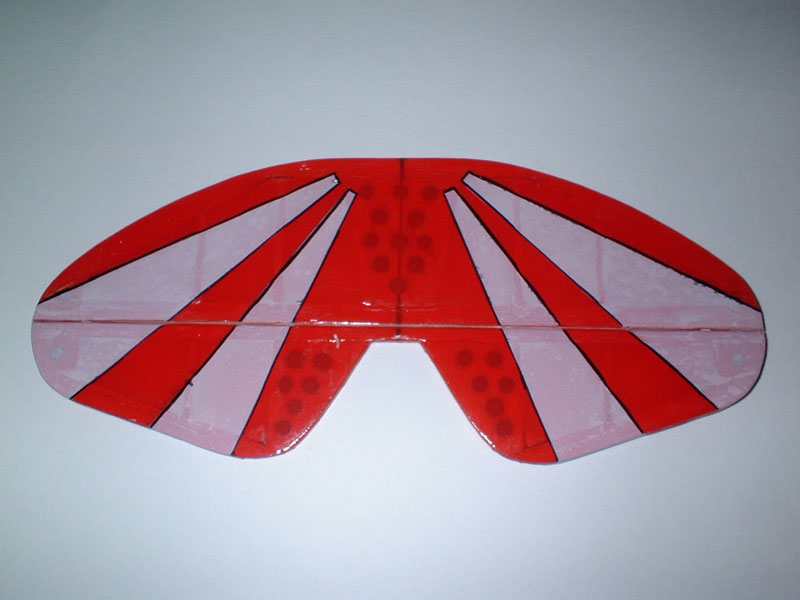
커버링은 MicroLite 를 이용합니다. MicroLite 에 이미 접착제가 발라져 있으나 접착력이 조금 떨어지기 때문에
미리 뼈대에 딱풀을 바른 다음 MicroLite를 붙이고 다리미로 다림질을 합니다.
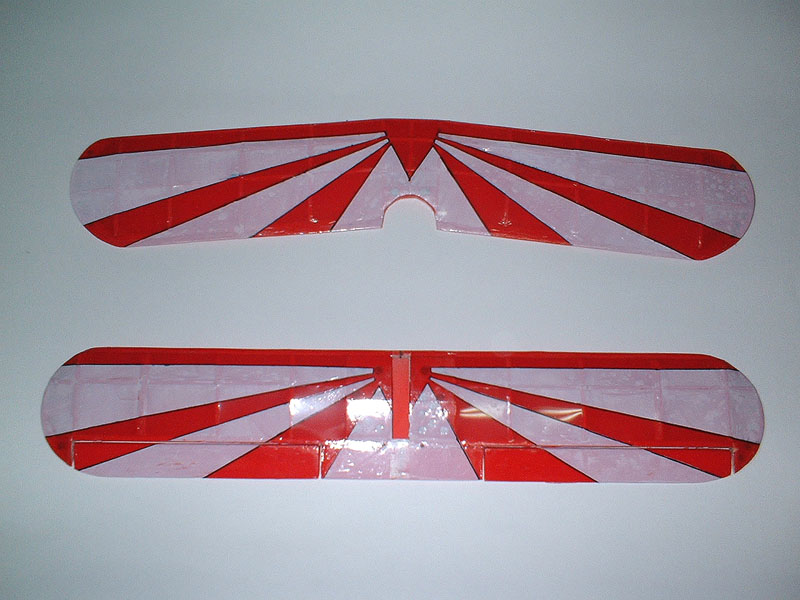
흰색 MicroLite를 이용해 주날개 트림을 넣었습니다. 검은색 트림은 유성네임펜을 사용했습니다.
2003.2.26
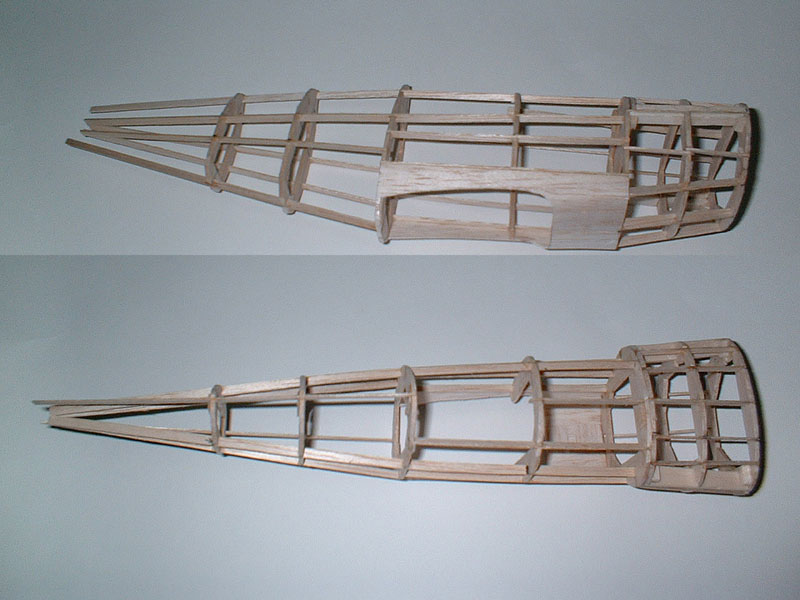
작업진도가 늦어졌습니다. 동체 뼈대 작업 진행 중입니다.
동체 뼈대 아래면입니다.
2003.2.28
수평꼬리날개도 흰색 MicroLite를 이용하여 트림을 넣습니다.
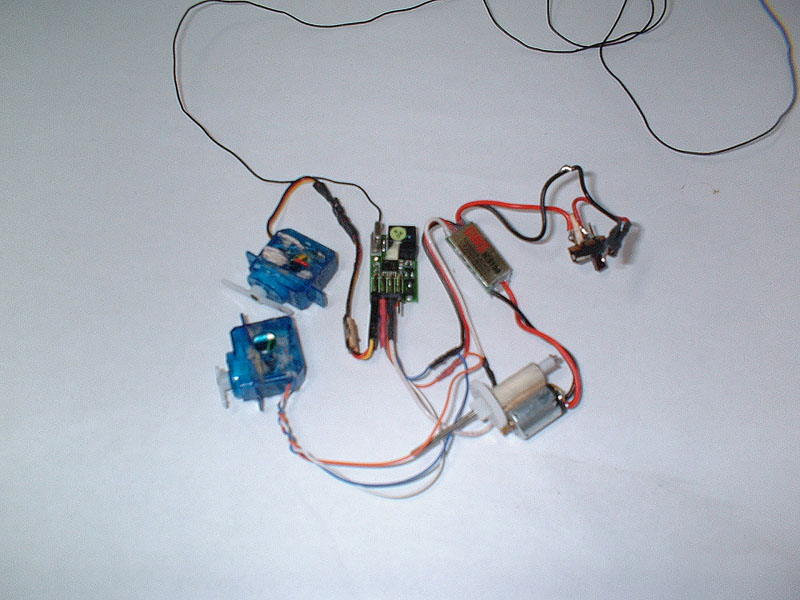
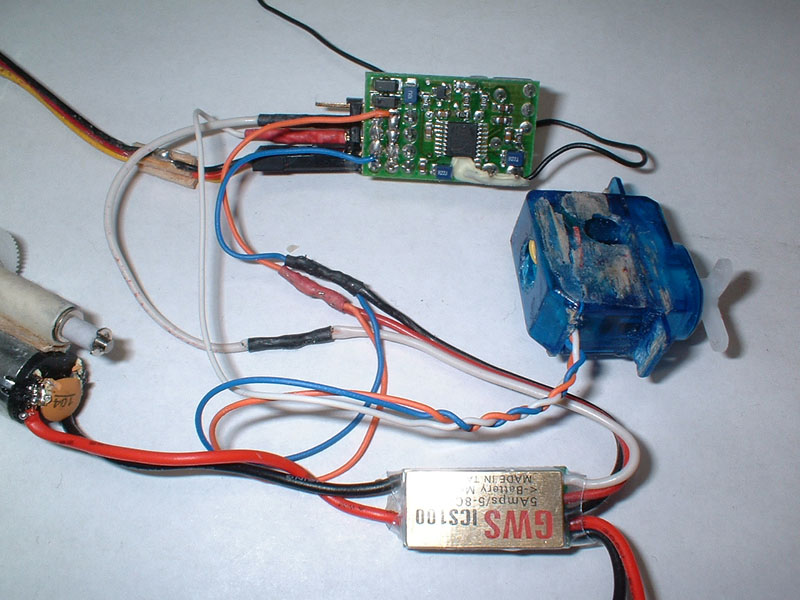
수신기, 서보, 6.2:1 기어다운모터, ESC 입니다.
수신기 - GWS R4P PICO
서보 - Hitec HS-50
모터 - GWS LPS-B2C-C(6.2:1) 감량
ESC - GWS ICS-100
수신기는 감량을 했습니다. 불필요한 핀을 제거하고 외피도 벗겨냈습니다.
신호선(signal) 이외에 전원선은 +,- 선 하나씩만 있으면 됩니다.
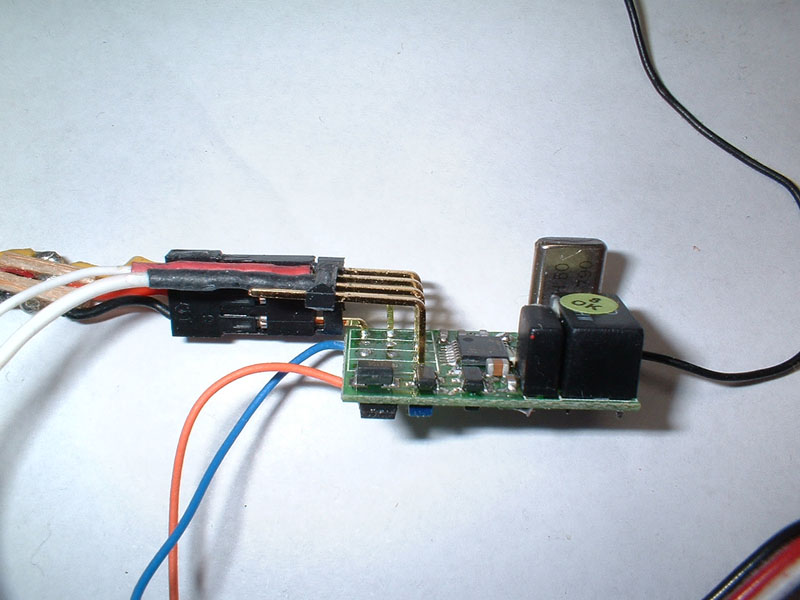
수신기와 엘리베이터 서보, ESC 연결 모양입니다.
엘리베이터 서보의 연결선도 가늘고 가벼운 선으로 교체했습니다.
2003.3.1

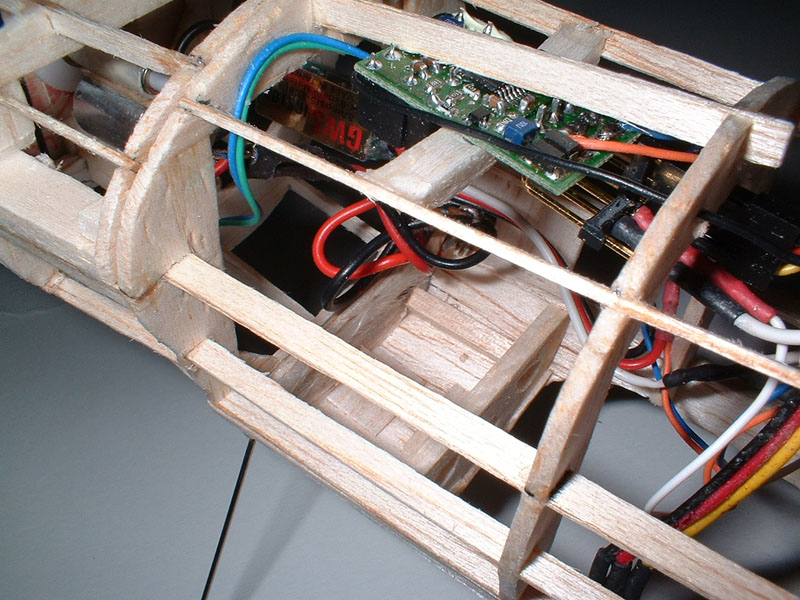
모터와 ESC, 수신기의 배치를 마쳤습니다.
크리스탈은 교환이 가능하도록 수신기에서 뽑아내었습니다.
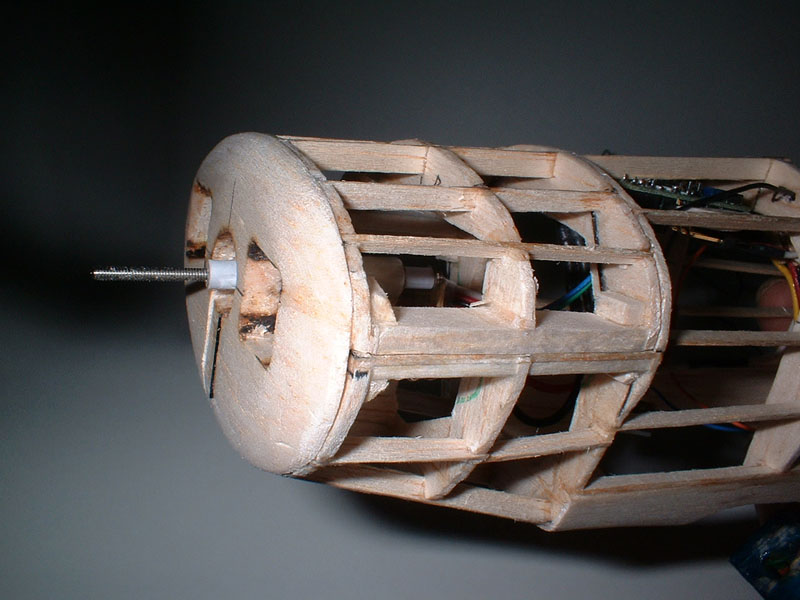
기수 부분의 모습 1
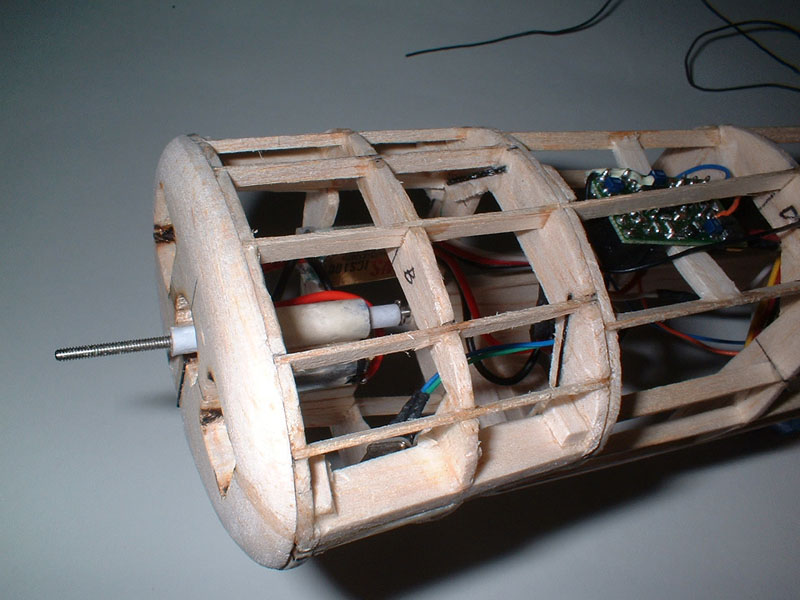
기수 부분의 모습 2
2003.3.2
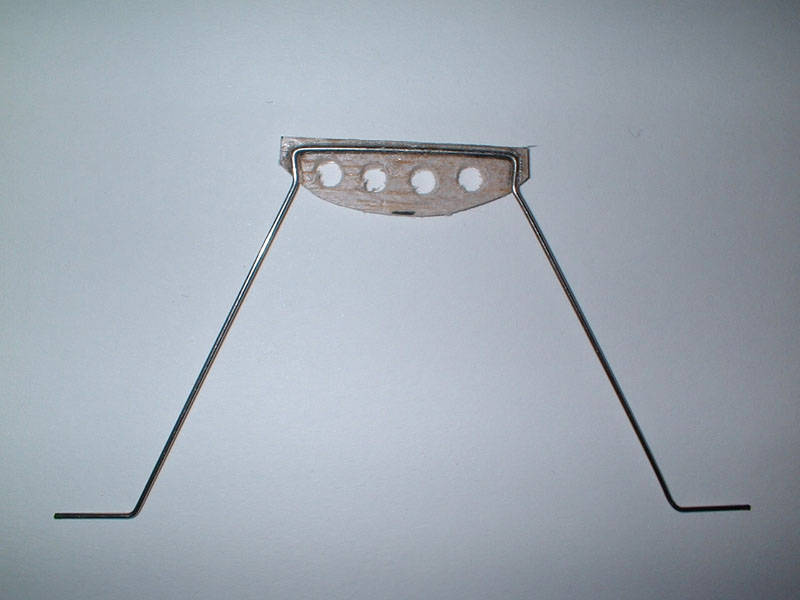
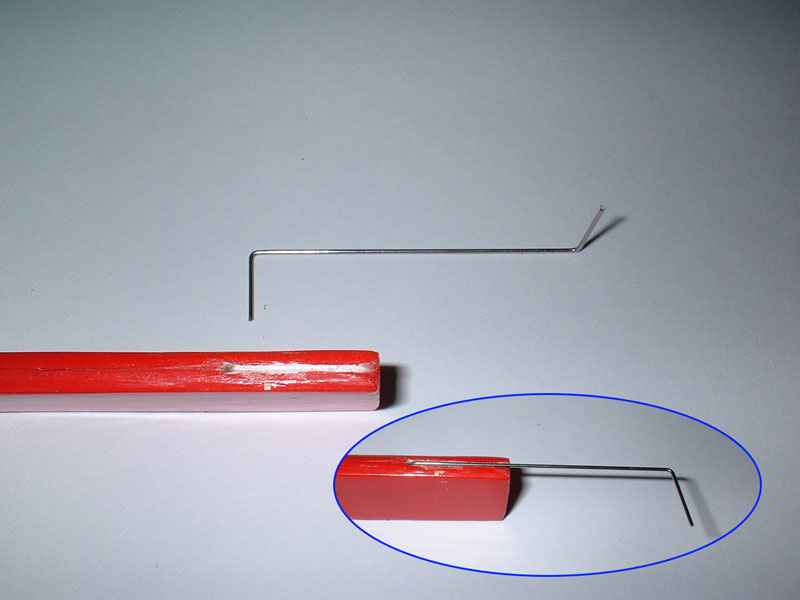
랜딩기어가 고정될 부분의 동체하단부 단면을 제작해 지름 1mm 피아노선으로 만든 랜딩기어를 접착합니다.
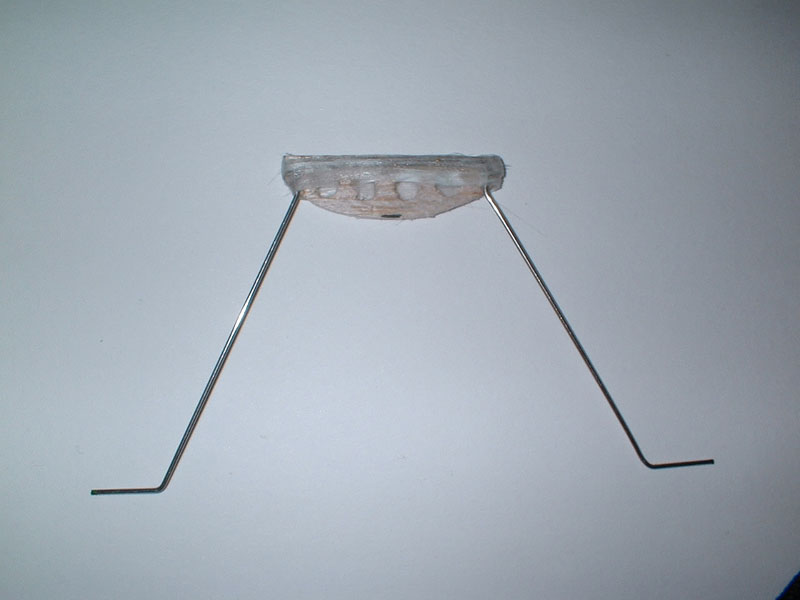
랜딩기어부의 강도를 확보하기 위해 파이버글라스 로빙을 한 번 감아 접착했습니다.

랜딩기어를 동체에 접착합니다.
랜딩기어의 동체내부 접착 모습입니다.
2003.3.3
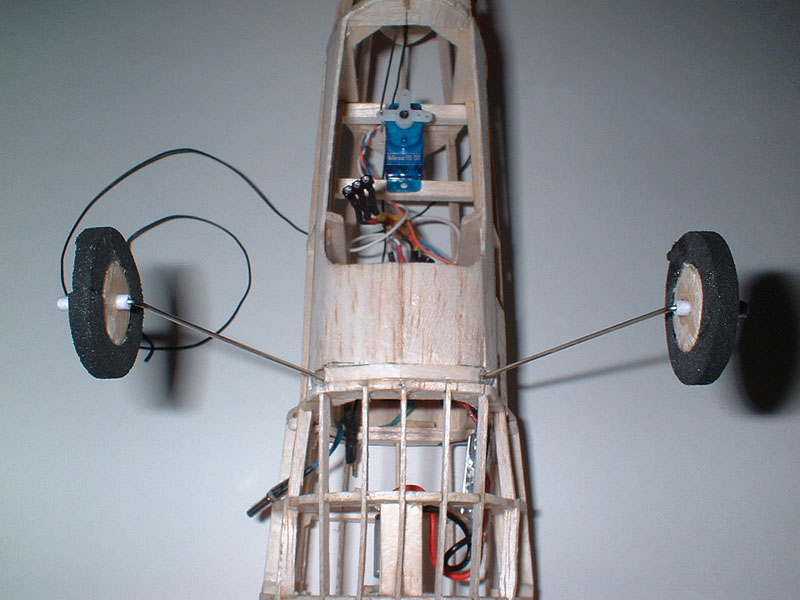
4륜구동 미니카의 스폰지 타이어로 만든 휠입니다.
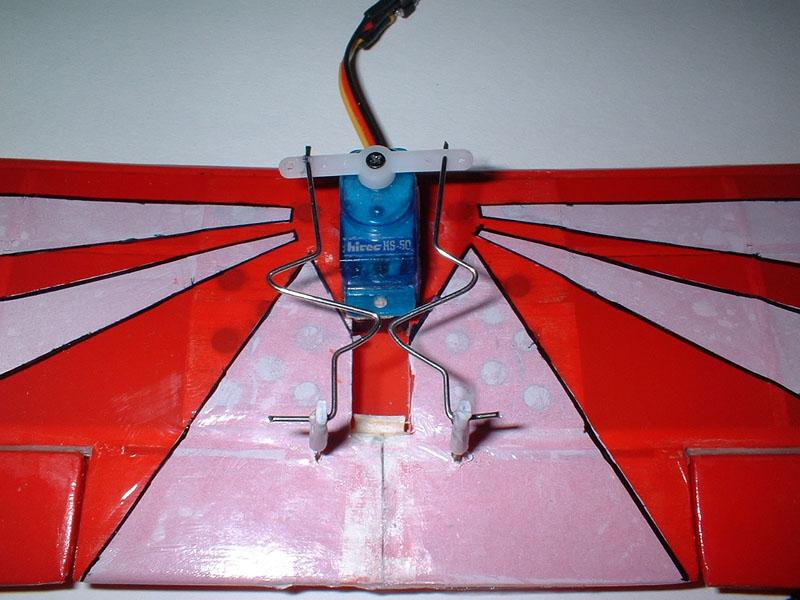
에일러론 서보를 설치하고 링키지를 연결합니다. 링키지는 조정이 가능하도록 "Z" 형태로 구부립니다.
동체에 꼬리날개를 부착합니다.
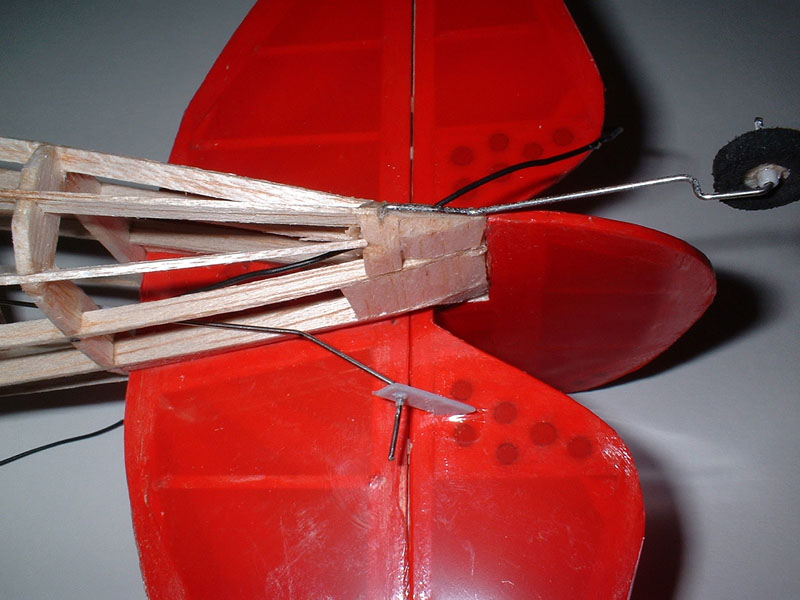
엘리베이터 링키지 모습입니다. 종이를 몇겹 붙여 순간접착제로 마무리한 링키지 혼입니다.
2003.3.5
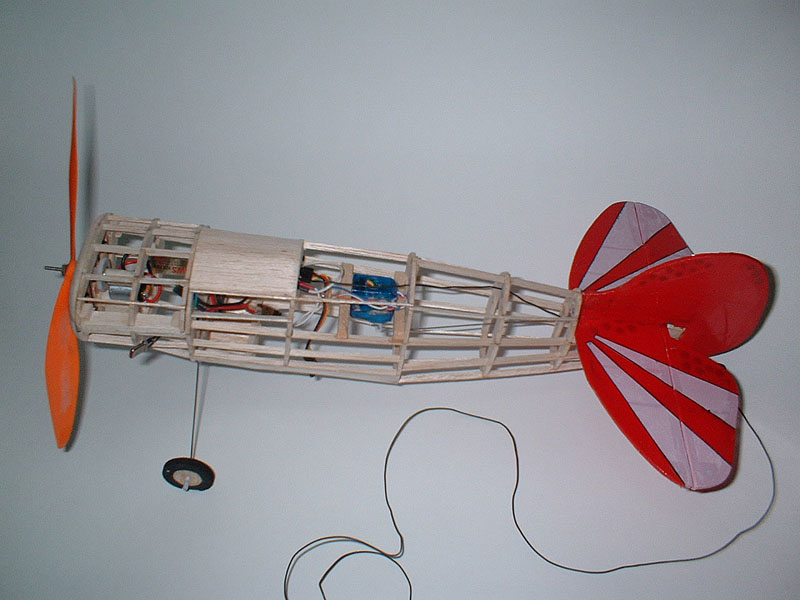
완성된 모습입니다. 휠팬츠와 스피너등은 시험비행 후 제작을 고려해야겠습니다. 아무래도 무게때문에...




완성중량은 70g 입니다. 목표중량에서 5g 초과했습니다.